 Estados Unidos
Estados Unidos
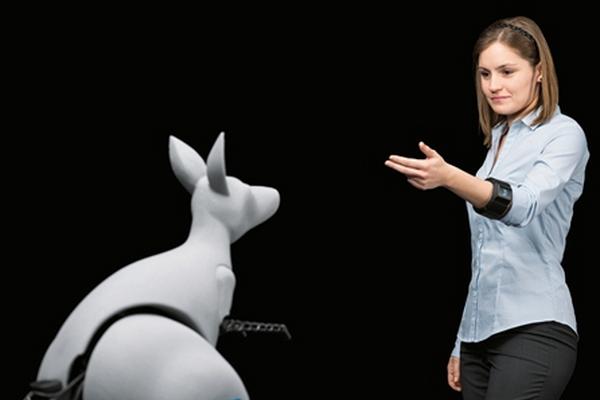
Canguro
Uno de los autómatas desarrollados por la compañía Festo (www.festo.com), como parte de su programa Bionic Learning Network de tecnologías inspiradas en la naturaleza, en colaboración con distintas universidades e institutos de investigación, es el Bionic Kangaroo (canguro biónico), uno de los viajeros más innovadores del arca de robots moderna.
Al igual que el animal en que se inspira, el canguro robot recupera y almacena la energía de un salto cuando cae al suelo para volverla a emplear de forma eficiente la próxima vez.
El canguro artificial combina técnicas de propulsión neumática y eléctrica, presenta una gran estabilidad en el salto y la caída e incorpora una precisa técnica de control y regulación inteligente, según Festo, quien agrega que su construcción, muy ligera, se controla mediante una pulsera que detecta los gestos del operador del canguro biónico y los transforma en comandos transmitidos a éste de modo inalámbrico.
Este robot tiene un tendón de Aquiles artificial, poderoso y elástico, hecho de una goma especial que amortigua la caída de su salto, impulsado por un cilindro neumático, y almacena su energía para reaprovecharla en el siguiente brinco, mientras que las articulaciones de las rodillas y tobillos están conectados a través de un dispositivo cinemático que le posibilita hacer una secuencia de movimientos interrelacionados.
Según Festo, esto permite reproducir, mediante la técnica y con la mayor similitud posible, el tipo de movimiento único del marsupial australiano natural, capaz de desplazarse con rapidez y eficiencia sobre un terreno con sus patas traseras.
Los técnicos germanos están utilizando el canguro biónico para recrear su singular salto una y otra vez en diferentes situaciones, a fin de aprender todo lo posible del mecanismo y aprovecharlo para diseñar nuevos sistemas de movimiento, que combinen la propulsión mediante el aire comprimido y los servomotores eléctricos.
Pingüino biónico
Otro de los ocupantes de la posible arca de robots de Festo es el Aqua Penguin o pingüino acuático, un vehículo subacuático autónomo que, como su arquetipo real, tiene un contorno hidrodinámico.
La propulsión que este autómata consigue mediante sus aletas laterales y el movimiento multidireccional de su cabeza y cola le permite maniobrar en espacios estrechos, girar al instante cuando sea necesario e incluso nadar de espaldas.
Los pingüinos biónicos están diseñados como vehículos para desplazarse bajo el agua, capaces de orientarse por sí mismos y navegar de manera autónoma en un espacio confinado de agua, como un acuario, según señalan sus diseñadores.
Estas máquinas se orientan mediante un sistema de sónar en tres dimensiones que, al igual que el de los delfines naturales, emite sonidos y recibe su eco reflejado por el entorno, según indican desde la compañía germana, permitiéndoles formarse una imagen de lo que les rodea e, incluso, comunicarse con otros pingüinos robóticos para, por ejemplo, evitar colisiones.
En el torso del pingüino acuático, que puede moverse en cualquier dirección, se ha incorporado la denominada estructura biónica Fin Ray, que simula el movimiento de la aleta caudal de un pez y está formada por tres varillas extensibles y retráctiles fabricadas en una intrincada estructura de fibra de vidrio.
Este sistema puede configurarse como un trípode muy flexible, cuyas tres pinzas pueden sujetar y depositar objetos frágiles y de formas irregulares, y trabajar con largas sucesiones de objetos de formas totalmente diferentes, por lo que se prevé aplicarlo en la tecnología de manipulación mecánica automatizada.
Vuela como un pájaro
Por otra parte, con el Smart Bird (pájaro inteligente), un modelo ultraligero pero potente, aerodinámico y ágil, la compañía alemana afirma haber conseguido dar un paso más para hacer realidad uno de los sueños más antiguos de la humanidad: volar como las aves.
Esta tecnología biónica, que pesa 450 gramos, mide casi dos metros con las alas extendidas y se inspira en la gaviota argéntea. Puede despegar, volar y aterrizar de manera autónoma, al interactuar con las corrientes de aire, sin necesidad de recibir impulsos adicionales.
“Sus alas no solo se mueven de arriba abajo, sino que también pueden girar en ángulos específicos”, explican sus diseñadores. Su torso aloja una batería, un minimotor, la transmisión, el mecanismo de manivela y la electrónica de control y regulación, precisa la compañía.
De acuerdo con Festo, esto es posible gracias a una unidad articulada de torsión de la máquina que, junto con su complejo sistema de control, alcanza un elevado grado de eficiencia en la operación de vuelo, con lo que ha conseguido una adaptación técnica del modelo natural muy eficiente en términos energéticos.
Mediante el desarrollo del Smart Bird, la empresa ha investigado y probado el comportamiento de los fluidos, el uso mínimo de materiales, una construcción extremadamente ligera y la integración funcional de diferentes accionamientos acoplados. “Hemos ido adquiriendo nuevos conocimientos útiles para el diseño de nuevas generaciones de cilindros y válvulas con una mayor eficiencia y un menor consumo de recursos y energía”, se indicó.
Peces
Además, Festo ha desarrollado dos peces robotizados de control remoto: el Aqua Ray, propulsado hidráulicamente y cuya forma de moverse se han desarrollado tomando como modelo a una mantarraya, y el Airacuda, un pez accionado neumáticamente y cuya estructura, forma y cinemática obedecen a su modelo biológico: la barracuda.
“El Aqua Ray es propulsado y controlado mediante un mecanismo basado en la anatomía funcional de las aletas de los peces e imita la propulsión de la aleta del pez original, en este caso ejercida por un músculo neumático, de características similares a las de uno real, aunque accionado con aire comprimido”, indican los investigadores alemanes.
“Esto le permite desplazarse, tanto planeando dentro del agua como mediante un batir activo de las aletas. Una forma de locomoción que posibilita su uso en distintos ámbitos de la investigación oceanográfica, sin perturbar el entorno natural”, según sus creadores.
El Airacuda también se mueve ágilmente por el agua, casi sin hacer ruido, y su cabeza impermeable oculta los sistemas electrónico y neumático que controlan el movimiento en forma de S de la aleta caudal, por medio de dos músculos neumáticos.
“Esta aleta consta de un flanco alternante de tracción y compresión, unido mediante cuadernas”, indican los expertos, quienes añaden que “si se ejerce presión sobre uno de los flancos, la estructura geométrica se arquea por sí misma en el sentido opuesto a la fuerza que está actuando, lo que le permite a este pez artificial desplegar en el agua toda la fuerza de oscilación de su aleta”.